Il nostro sito salva piccoli pezzi di informazioni (cookie) sul dispositivo, al fine di fornire contenuti migliori e per scopi statistici. È possibile disattivare l'utilizzo di cookies modificando le impostazioni del tuo browser. Continuando la navigazione si acconsente all'utilizzo dei cookie.
Il Laboratorio ICE è diviso in più aree tecnologiche, ognuna rappresentativa di un tipo di produzione. Un sistema di logistica composto da una linea di trasporto ed AGV connette le diverse aree, grazie a uno stack software innovativo deputato al controllo e al monitoraggio.
DETTAGLI
Le aree tecnologiche
Il laboratorio è supportato da un gruppo di aziende che ne seguono ed orientano lo sviluppo e vi sperimentano le proprie tecnologie.
Controllo Funzionale
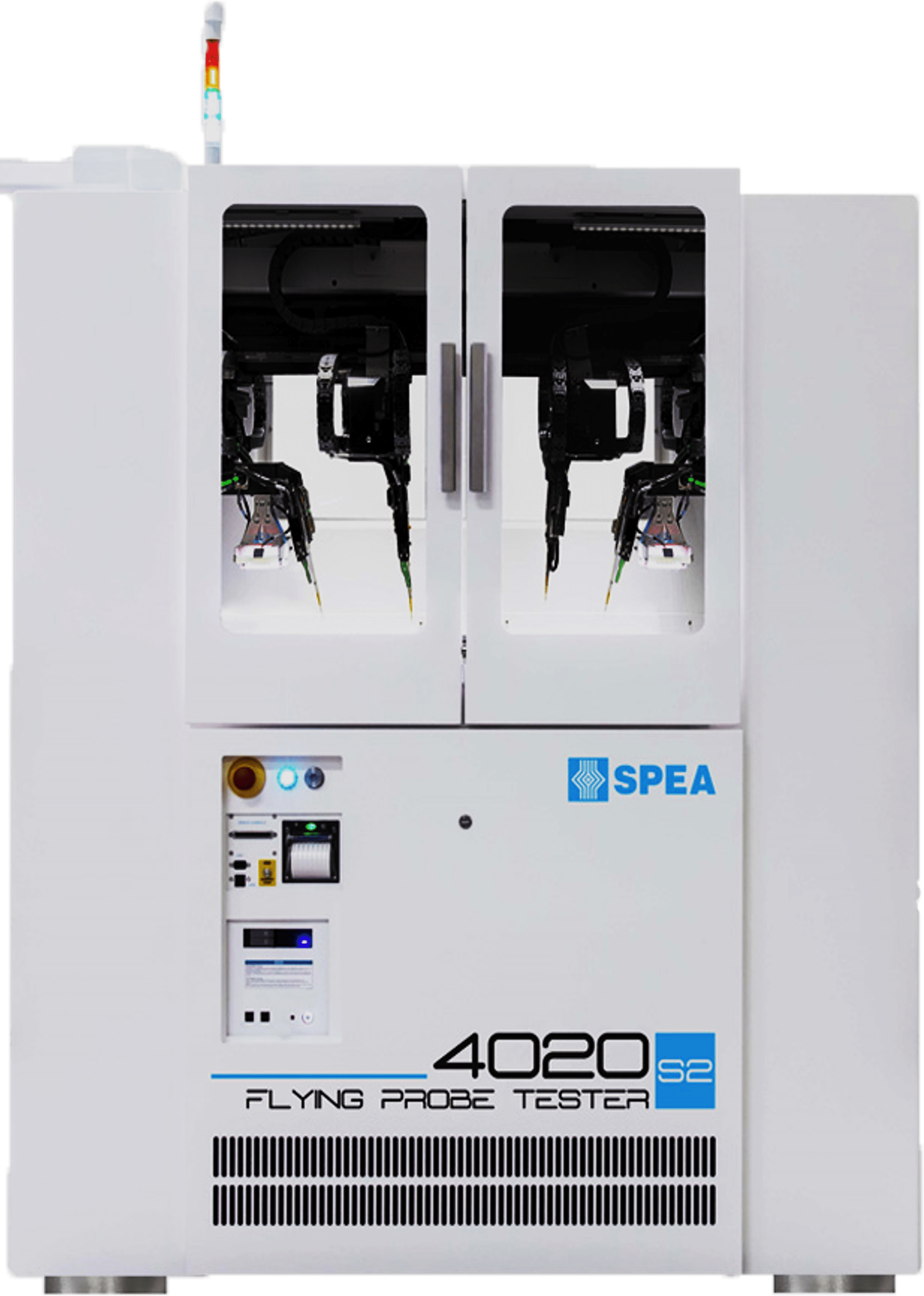
Macchina di controllo elettronico SPEA Flying Probe 4020 S2
SPEA 4020 S2 è un tester automatico funzionale a sonde mobili per il collaudo di schede elettroniche.
Il macchinario permette di effettuare un collaudo accurato di ogni singolo dispositivo, in modo da garantire che la strumentazione sia priva di difetti più o meno latenti, potenzialmente responsabili di guasti durante l’utilizzo.
I 4 assi del 4020 S2 si servono della tecnologia meccanica basata su motori lineari ad altissima accelerazione, garantendo un veloce movimento che conduce le sonde a contattare i test point sulla scheda. Gli encoder ottici lineari allineati agli assi X, Y e Z garantiscono un contatto preciso e accurato con i pad di saldatura dei componenti montati sulla scheda. Il set di strumentazione effettua le verifiche parametriche e funzionali su ciascun componente.
A completare la funzionalità del 4020 S2 contribuisce il software di sistema, un cervello artificiale in grado di leggere i disegni della scheda da collaudare per generare automaticamente un completo programma di test. In particolare, il software è in grado di effettuare un test con il 100% di copertura diagnostica in breve tempo, individuando: punti da contattare, misure da effettuare algoritmi di movimentazione da applicare.
CNC EMCO ConceptMill 105 è una fresatrice a quattro assi, dotata di azionamento principale a regolazione continua, tamburo porta-utensili a 10 posti, morsa pneumatica e dispositivo divisore NC opzionale. In quanto macchina da tavolo compatta, può essere utilizzata per l’insegnamento delle diverse funzioni e tecnologie di produzione. Per controllare il macchinario, è sufficiente dotarsi di un PC con il pacchetto software WinNC, che riproduce uno dei controlli industriali predisposti da EMCO. Il magazzino utensili è progettato con una logica direzionale, mentre l’area di lavoro è dotata di un assetto ergonomico e ad alta visibilità. Il macchinario comprende una protezione completa contro i trucioli e un’ampia vetratura. La fresatrice comprende un controllore Siemens Sinumerik Operate Shopmill.
Ulteriori caratteristiche:
Mandrino di incisione con guida scanalata
Motore asincrono trifas
Unità principale a regolazione continua
Divisore CNC come quarto asse opzionale
Interfaccia robotica per l'integrazione in sistemi FMS / CIM
Slitte e cuscinetti di carico in ghisa per garantire un elevato livello di precisione
3D DWS Systems XPRO S è una stampante stereolitografica che si serve di una sorgente laser per solidificare una resina liquida fotosensibile, in modo da realizzare modelli tridimensionali in materiale plastico. La macchina utilizza un laser UV di classe 3b, il quale, attraverso un asse mobile e un sistema di specchi oscillanti, permette la realizzazione di modelli tridimensionali.
La stampante è provvista inoltre di un sistema di movimentazione della vaschetta estraibile di contenimento della resina (TTT).
La produttività e la precisione, unite a un'ampia gamma di materiali, rendono questa stampante versatile e adatta a molti tipi di applicazioni industriali.
Ulteriori caratteristiche:
Dotata di un PC con monitor touch-screen integrato
Utilizza supporti con uno speciale brevetto che ne facilita la rimozione
Superficie della base di appoggio riscaldata per allungare la vita della vasca contenente la resina soggetta a deperimento dovuto all’uso
La stampante 3D Stratasys J826 è dotata di tecnologia multimateriale ed è in grado di creare oggetti componendo fino a otto materiali dalle differenti proprietà fisiche (opacità e trasparenza) e meccaniche (flessibilità e rigidità). Supporta inoltre più di 500.000 colori, eliminando la necessità di verniciare i modelli. La qualità cromatica della lavorazione è ottimizzata grazie alla convalida Pantone, che rende disponibili i colori del sistema PMS (Pantone Matching System) per la stampa 3D.
Ulteriori caratteristiche:
Profili di colore X-Rite
Ottenimento di una corrispondenza quasi perfetta per la forma, il colore e la consistenza durante la prototipazione rapida con materiali multicolore VeroVivid™
Utilizzo della famiglia di materiali Agilus30™ per creare componenti flessibili, capaci di flettersi e allungarsi
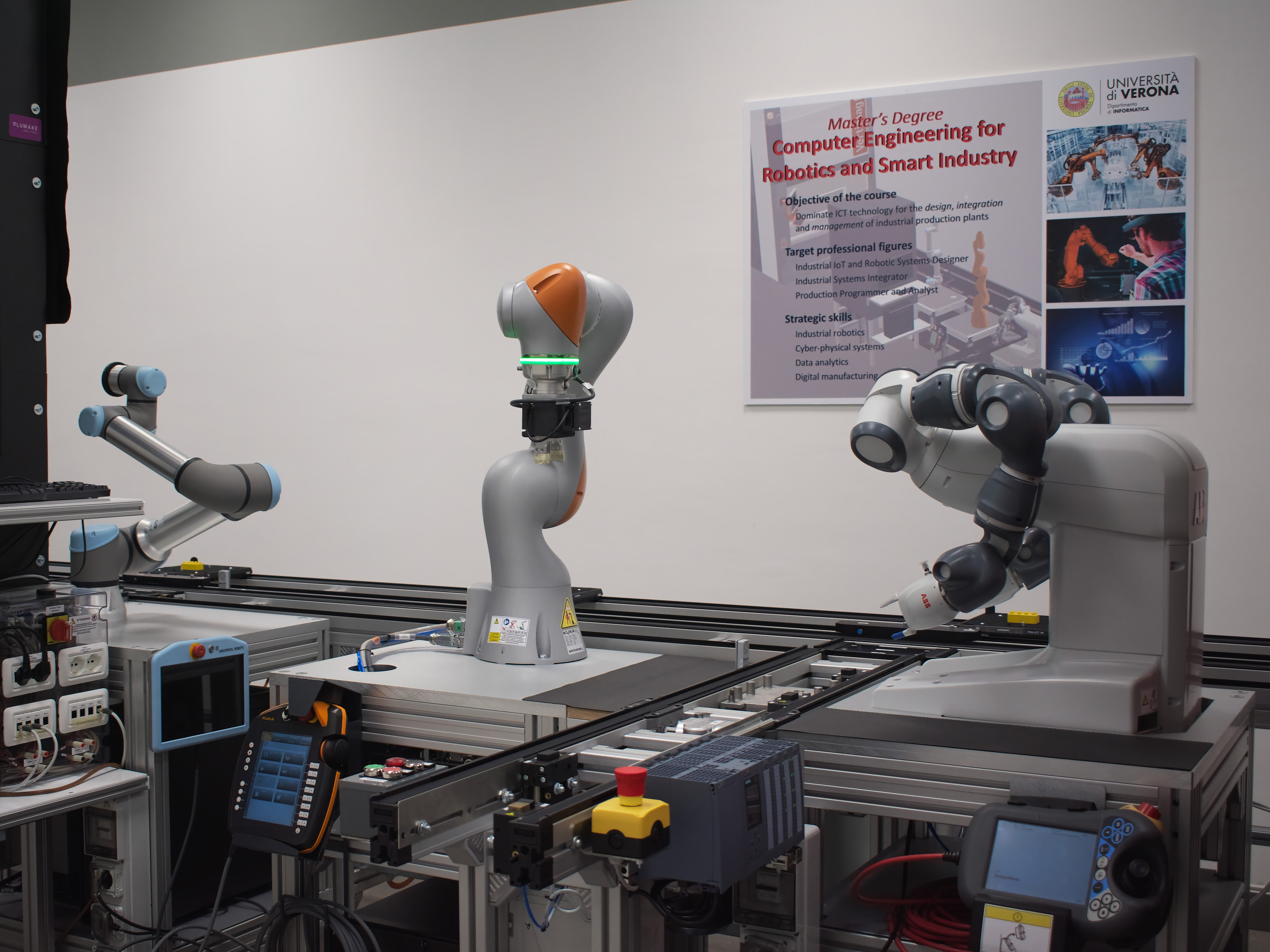
ABB YuMi IRB14000 è un robot collaborativo con due bracci dotati di sette gradi di libertà, per una maggiore flessibilità. Ciascun braccio è equipaggiato di gripper per la raccolta dei piccoli componenti tramite l’ausilio di aria compressa.
Inoltre, un braccio è dotato di telecamera per facilitare le operazioni che necessitano di assistenza visuale.
Ogni braccio ha un payload di circa 300 grammi e garantisce un'elevata precisione nel posizionamento, queste caratteristiche lo rendono ottimo per la gestione di piccoli oggetti. Nel Laboratorio ICE il suo compito è di lavorare nella cella di assemblaggio, cooperando con operatori umani e robotici.
Ulteriori caratteristiche:
Lavoro collaborativo ad alta precisione e velocità
Kuka LBR iiwa 14 R820 è un robot collaborativo con sette gradi di libertà. Dotato di doppio sensore di coppia su ogni giunto, il robot rileva con accuratezza i contatti ed è in grado di ridurre istantaneamente il livello di forza e velocità esercitate.
Kuka LBR iiwa 14 R820 è un robot collaborativo con sette gradi di libertà. Dotato di doppio sensore di coppia su ogni giunto, il robot rileva con accuratezza i contatti ed è in grado di ridurre istantaneamente il livello di forza e velocità esercitate.
Il braccio del robot è stato progettato per sostenere fino a 14 kg, mantenendo sempre un’ottima precisione nel posizionamento. Nel Laboratorio ICE il suo compito è di lavorare nella cella di assemblaggio, cooperando con operatori umani e robotici.
Ulteriori caratteristiche:
Capace di apprendere, grazie alla memorizzazione della posizione desiderata e delle coordinate del punto di traiettoria
Altamente sensibile, con il suo servocomando ad alte prestazioni, il robot è in grado di rilevare rapidamente i contorni sotto il controllo della forza
Dotato di un buon grado d’indipendenza, per mezzo del controller KUKA Sunrise Cabinet, che favorisce l'avvio rapido delle applicazioni
Il PLC di safety Siemens S7-1500 è situato nell’area di assemblaggio e serve a coordinare le attività dei robot, monitorare la sensoristica a supporto e gestire le automazioni introdotte. Questo modello è dotato di funzionalità di safety e gestisce anche il monitoraggio per la sicurezza delle aree. Il PLC supporta il protocollo di comunicazione OPC-UA ed è direttamente integrabile nell’infrastruttura software del laboratorio.
Ulteriori caratteristiche:
Uso flessibile dei pacchetti software opzionali, come Proneta
Possibilità di utilizzare applicazioni Edge come SIMATIC Flow Creator
Compatibilità con le estensioni dei linguaggi di programmazione di alto livello, come C/C++
La cella a controllo visuale è costituita dalla telecamera Basler as A1600-60gm e dal laser Gocator 3210A, descritti in seguito. La camera Basler acA1600-60gm GigE è dotata di sensore CMOS e2v EV76C570. Utilizza 60 frame al secondo e una risoluzione di 2 megapixel. È in grado d’interfacciarsi al calcolatore EDGE per effettuare un controllo di qualità del prodotto. Per evitare i disturbi luminosi, la camera viene posta in un’apposita cabina oscurata che si trova in una baia della linea di produzione. Gigabit Ethernet o 'GigE' è l’interfaccia standard per le camere deputate all’image processing in ambito industriale. Qualora un pezzo difettoso fosse rilevato, il sistema riceverebbe una notifica e avvierebbe la procedura di scarto.
Ulteriori caratteristiche:
Sensore e2v EV76C570 ABT con CMOS a scansione progressiva
Otturatore globale
Dimensione del pixel di 4.5 μm x 4.5 μm
Disponibile per Windows, Linux x86, Linux ARM e macOS
Controllo dell'esposizione programmabile tramite l'API della camera
Il laser scanner Gocator 3210° è utilizzato per l'ispezione tridimensionale a tutto campo di componenti di grandi dimensioni tramite la funzionalità di scansione 'snapshot'. Il laser scanner presenta una velocità di scansione di 6 Hz con accelerazione. Il campo visivo si estende fino a 100 x 154 mm. I parametri che riassumono l’integrità del sensore sono monitorabili sulla dashboard dell’interfaccia utente.
Il calcolatore EDGE è connesso direttamente alle telecamere, ed è in grado di elaborare i flussi video e i dati dei sensori laser in modalità real-time. È dotato di una CPU a elevate prestazioni, affiancata da una GPU Nvidia. Il calcolatore si serve del protocollo di comunicazione OPC-UA per aggregare i risultati delle elaborazioni e renderli disponibili ai sistemi di controllo del laboratorio.
Universal Robots UR5e è un robot collaborativo a sei assi posizionato in corrispondenza del sistema a telecamere. Solleva i pezzi durante l’analisi, con lo scopo di esporre tutti i lati alla vista delle telecamere, in modo che l’analisi visuale risulti completa. Il calcolatore EDGE di area ne gestisce la coordinazione.
Ulteriori caratteristiche:
17 funzioni di sicurezza regolabili avanzate
Controllo remoto secondo lo standard ISO 10218
Payload: 5 kg
ProfiNet ed EthernetIP con frequenza del segnale a 500 Hz
VERTIMAG EF è un sistema automatico deputato allo stoccaggio e all’estrazione di materie prime e di prodotti finiti.
Il caricamento e l’estrazione dei pezzi dal magazzino avvengono sia manualmente che automaticamente, con l’ausilio di un braccio manipolatore, installato in corrispondenza della baia di carico del magazzino verticale.
Il macchinario permette di ottimizzare lo spazio in altezza, riducendo a un decimo la superficie occupata rispetto a un magazzino tradizionale. A comporre il magazzino verticale, concorrono due fronti di scaffali dove vengono alloggiati vassoi metallici movimentati da un elevatore.
Utilizzando questo sistema, il Laboratorio ICE studia e a testa gli algoritmi di ottimizzazione per lo stoccaggio efficiente dei pezzi, nel rispetto della ricetta di produzione applicata sulla linea.
Ulteriori caratteristiche:
Ideale per materiale di differente tipologia, peso e dimensione
Bosch-Rexroth è la linea che trasporta minipallet, di dimensione 24 x 24 cm e predisposti per ancorare piccoli oggetti, indirizzandoli verso le diverse celle di lavoro. Il software, gestito da un PLC Siemens S7-1200, è programmato per la riconfigurabilità della linea e ha il compito di movimentare e tracciare ogni pallet, senza un percorso predefinito. Per il controllo della linea, è possibile operare da remoto tramite il protocollo OPC-UA oppure in loco tramite il pannello operatore ASEM, completo d’interfaccia grafica interattiva sviluppata con il software di Uniqo HMI.
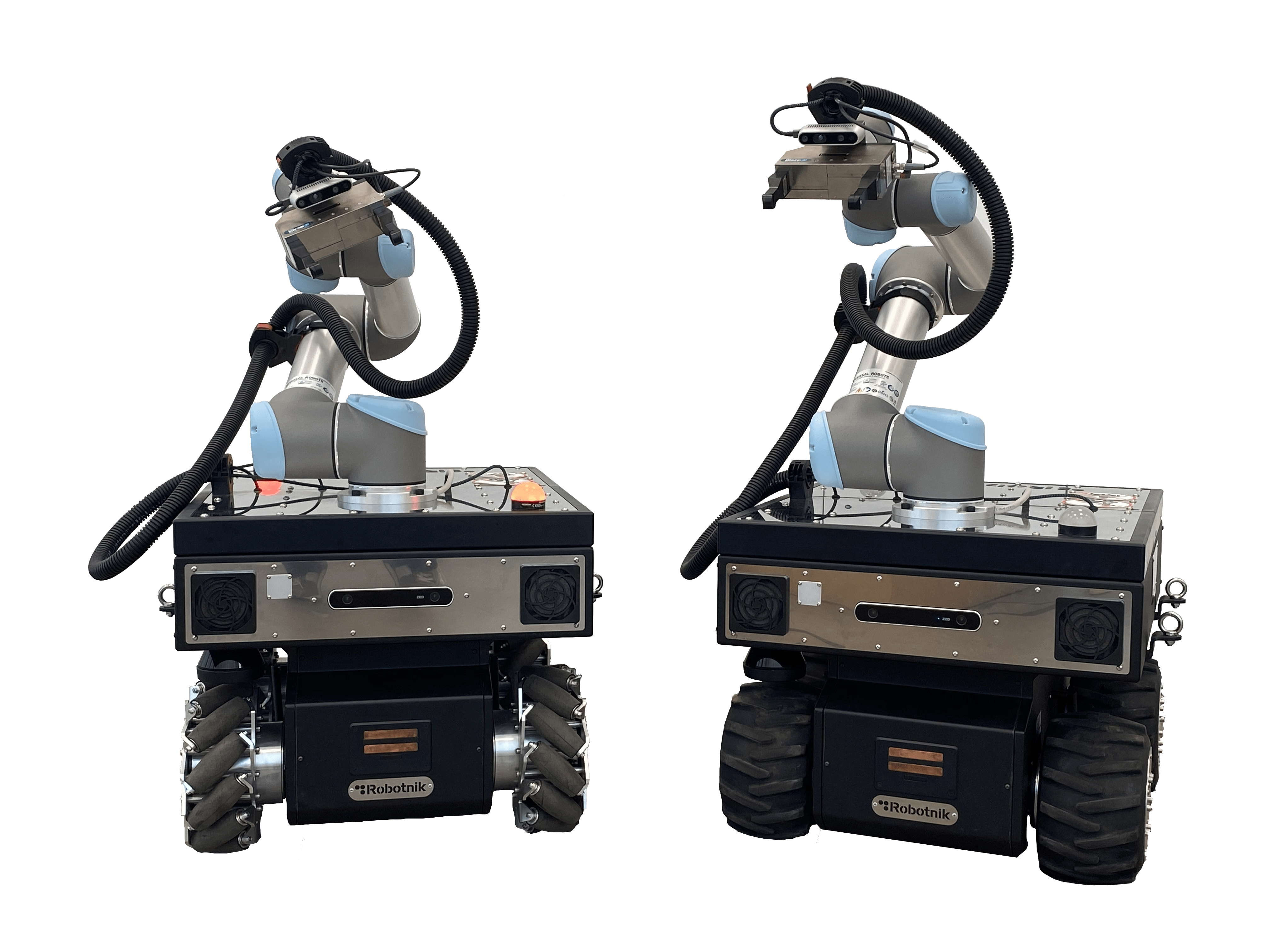
I due robot manipolatori su base mobile Robotnik RB-KAIROS 5 incorporano uno stack software open-source basato su ROS (Robot Operating System). I robot sono composti da una base mobile su ruote (classiche o svedesi) che sostiene un braccio manipolatore UR5.
Possiedono un’unita di controllo real-time basata su PLC Sick, che utilizza laser scanner e camere di profondità per garantire la sicurezza degli operatori vicino all’AGV (Automated Guided Vehicle). Gli RB-KAIROS operano autonomamente in sinergia con la linea a minipallet, con lo scopo di realizzare una movimentazione efficiente dei pezzi; allo stesso tempo, possono garantire il caricamento automatizzato dei pezzi nel magazzino verticale, o della fresa CNC.
I robot sono dotati di una base cinematica omnidirezionale, che consente loro di muoversi in ambienti dalle superfici ristrette.
Il MES di Siemens OPCenter Execution Discrete garantisce l'impostazione, il tracciamento e la gestione delle attività produttive. A tal fine, sono presenti driver appositi per comunicare con le diverse aree di lavoro. La comunicazione è realizzata interamente tramite il protocollo OPC-UA, secondo il paradigma del Service-Oriented Architecture (SOA).
Il sistema Meta-MES, sviluppato presso il laboratorio ICE, si affianca al MES e all'archiettura di raccolta dati per controllare l'impianto di produzione e realizzare dinamicamente i workorders reagendo dinamicamente ai cambiamenti dell'impianto e del piano di produzione in real time. Riceve dal primo i dati di produzione desiderata e le ricette produttive associate, dalla seconda ha accesso allo stato dell'impianto e grazie al concetto di SOA (Service Oriented Architecture) usa le funzionalità esposte da macchine ed architettura di raccolta dati per attuare il piano di produzione.
Ulteriori caratteristiche:
Elevata efficienza e flessibilità dei processi
Processi produttivi sincronizzati per la gestione ottimale della supply-chain
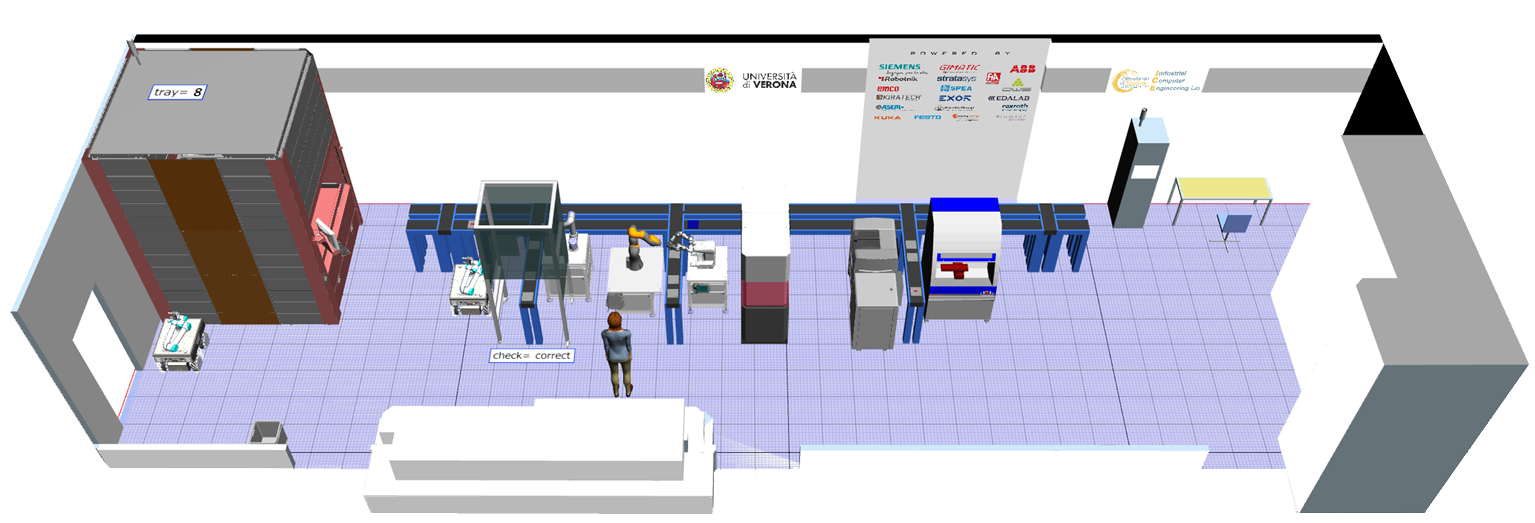
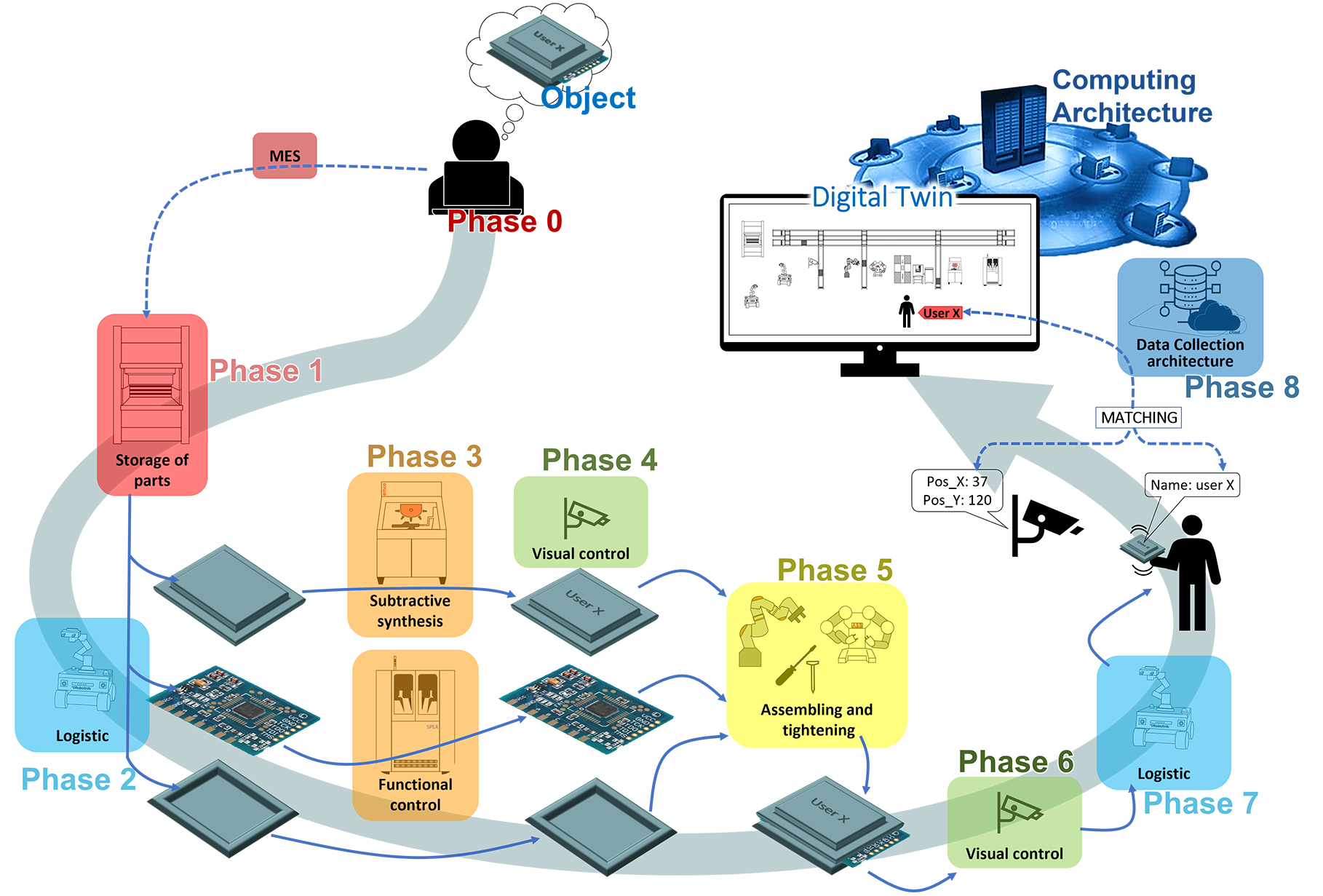
Il Laboratorio ICE ha sviluppato per la propria linea di produzione il Digital Twin, mediante l’utilizzo del software Tecnomatix Plant Simulation di Siemens.
Il Digital Twin consiste nella rappresentazione virtuale di un processo, prodotto o servizio. In questo caso è il modello della linea di produzione che permette sia di fare analisi dati che di monitorare il sistema. Nello specifico sono presenti due Digital Twin: Autonomo e Connesso.
Il Digital Twin Connesso, chiamato Digital Shadow, comunica con i server OPC-UA delle macchine per monitorarne lo stato e replicarlo visivamente in tempo reale. Si connette alla linea con dei sensori e riproduce l’impianto fisico, permettendo un controllo in tempo reale sull’intero sistema.
Il Digital Twin Autonomo rappresenta la versione asincrona ed è progettato per simulare l’impianto nel suo insieme; in particolare, incorpora modelli accurati delle macchine, replicandone le funzionalità; è adoperato per testare macchinari che potrebbero essere integrati in futuro; è utile per ottenere statistiche temporali realistiche, così da studiare configurazioni alternative della linea di produzione e ottimizzarne le tempistiche; inoltre, tramite l’analisi dati, è possibile effettuare manutenzione predittiva, rilevando un possibile guasto prima che si verifichi.
Raccolta dati IOT e IIOT
Architettura di Raccolta dati basata Kubernetes, Gateway IoT/IIoT
Si è deciso di utilizzare l’architettura di raccolta dati basata su cluster Kubernetes, per raccogliere, monitorare e storicizzare i dati prodotti dall’infrastruttura del laboratorio (come temperatura, luminosità, presenza) e dalla sensoristica Iot che si trova negli spazi adiacenti.
L’architettura, ospitata sulla Piattaforma Computazionale di Ateneo, è flessibile e adattabile a ogni tipo di processo produttivo. Può essere adoperata per centralizzare i log e impostare alert a vari livelli e sfrutta il paradigma DevOps per automatizzare le fasi di compilazione e distribuzione delle nuove versioni del software che la compongono.
Si compone di più applicativi che cooperano tra loro, secondo il paradigma dei micro-servizi, per garantire affidabilità, interoperabilità ed estensibilità. Una pipeline di CI-CD (Continuous Intergation – Continuous Deployment) e il cluster Kubernetes su cui vengono eseguite le applicazioni garantiscono scalabilità e robustezza alla gestione del sistema.
L’architettura permette inoltre di selezionare un sottoinsieme dei dati memorizzati al suo interno, effettuando la preelaborazione e il trasferimento su differenti soluzioni cloud, fra le quali Mindsphere di Siemens e Azure di Microsoft.
Ulteriori caratteristiche:
Portabilità garantita dal fatto di essere 100% open-source
Scalabilità configurabile a diversi livelli
Health check & Self Healing, che favoriscono la protezione contro i guasti delle applicazioni ospitate, facendo leva su un controllo costante dei nodi del cluster e dei container in esecuzione
Deployment alla nuova versione automatico e sicuro, garantendo l’assenza dei tempi d’inattività e il rollback alla versione precedente in caso di errore
Il gateway BOX-IO, prodotto dall’azienda informatica EDALab, è adottato per mettere in comunicazione i sensori IoT con le reti office.
Ogni macchinario dell’edificio ha installato un sensore di consumo energetico, mentre su ogni locale è localizzato un sensore che rileva la presenza delle persone e un altro sensore che monitora la qualità dell’aria, analizzandone la temperatura, l’umidità e la quantità di CO2.
Il gateway BOX-IO effettua la raccolta dati anche da sensori non IoT già presenti e può gestire anche l’illuminazione dei locali, in questo modo è possibile garantire il comfort del personale.
Il protocollo di comunicazione OPC-UA rende disponibili tutti i dati raccolti, consentendo un’efficace integrazione con l’architettura di raccolta dati.
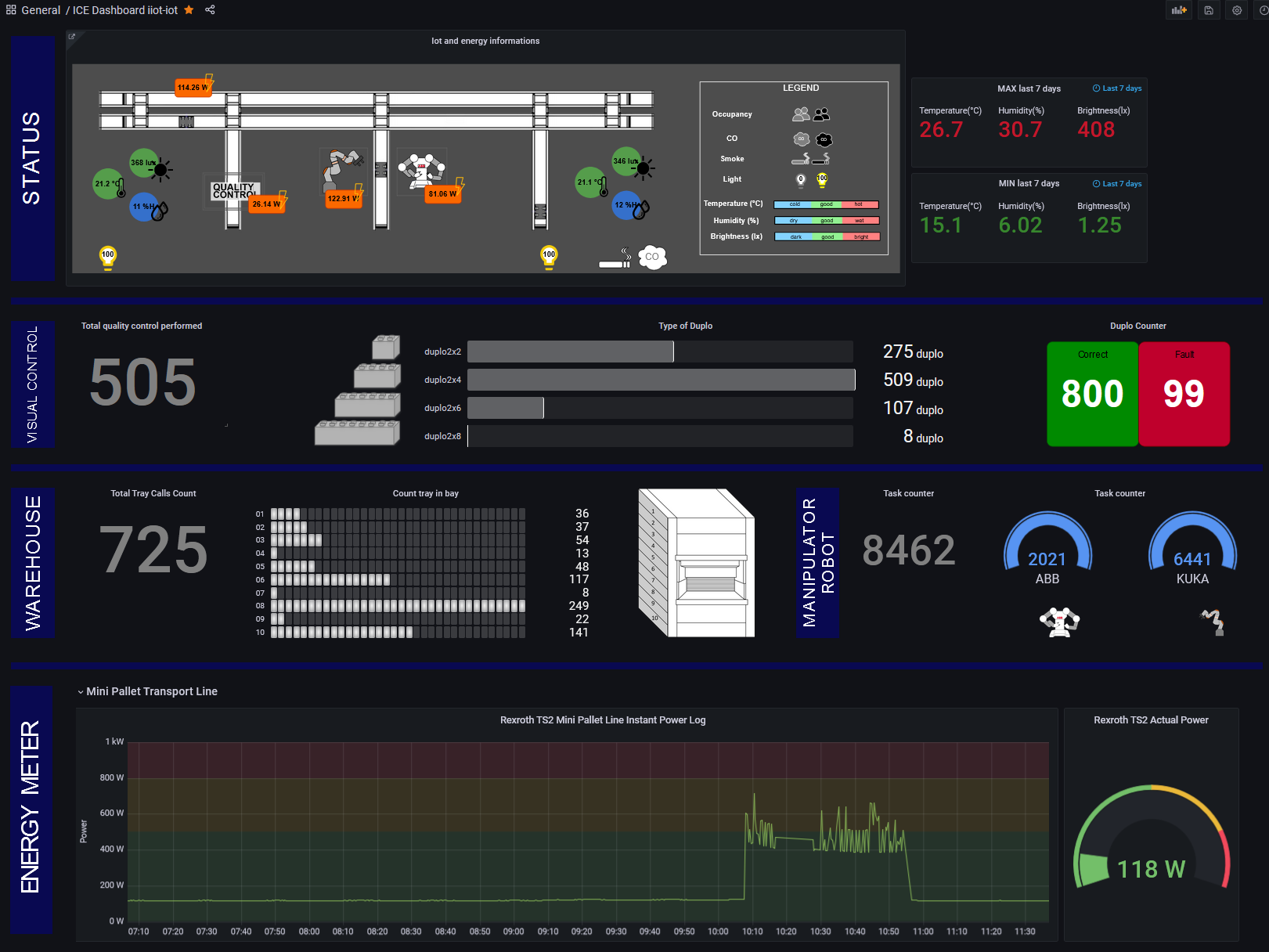
Per il monitoraggio ambientale, è stata creata una dashboard che permette la visualizzazione dei dati raccolti tramite i diversi sensori che sono stati installati nella struttura. Questi trasmettono i dati al gateway intermedio BOXIO che poi trasferisce le informazioni all’architettura di collezione dati.
I dati che vengono monitorati sono: temperatura, umidità, luminosità, presenza di persone, fumo e monossido di carbonio. Inoltre, anche la centralina delle luci Duemmegi è stata all’architettura di collezione dati e in questo modo è possibile monitorare lo stato delle luci in tutta la struttura.
SCHEMA
Il dimostratore finale
FOTO
Galleria del laboratorio
Powered by
Le aziende che hanno fornito macchine e tecnologie presenti all'interno del laboratorio ICE.






 CNC EMCO ConceptMill 105 è una fresatrice a quattro assi, dotata di azionamento principale a regolazione continua, tamburo porta-utensili a 10 posti, morsa pneumatica e dispositivo divisore NC opzionale. In quanto macchina da tavolo compatta, può essere utilizzata per l’insegnamento delle diverse funzioni e tecnologie di produzione. Per controllare il macchinario, è sufficiente dotarsi di un PC con il pacchetto software WinNC, che riproduce uno dei controlli industriali predisposti da EMCO. Il magazzino utensili è progettato con una logica direzionale, mentre l’area di lavoro è dotata di un assetto ergonomico e ad alta visibilità. Il macchinario comprende una protezione completa contro i trucioli e un’ampia vetratura. La fresatrice comprende un controllore Siemens Sinumerik Operate Shopmill.
CNC EMCO ConceptMill 105 è una fresatrice a quattro assi, dotata di azionamento principale a regolazione continua, tamburo porta-utensili a 10 posti, morsa pneumatica e dispositivo divisore NC opzionale. In quanto macchina da tavolo compatta, può essere utilizzata per l’insegnamento delle diverse funzioni e tecnologie di produzione. Per controllare il macchinario, è sufficiente dotarsi di un PC con il pacchetto software WinNC, che riproduce uno dei controlli industriali predisposti da EMCO. Il magazzino utensili è progettato con una logica direzionale, mentre l’area di lavoro è dotata di un assetto ergonomico e ad alta visibilità. Il macchinario comprende una protezione completa contro i trucioli e un’ampia vetratura. La fresatrice comprende un controllore Siemens Sinumerik Operate Shopmill. 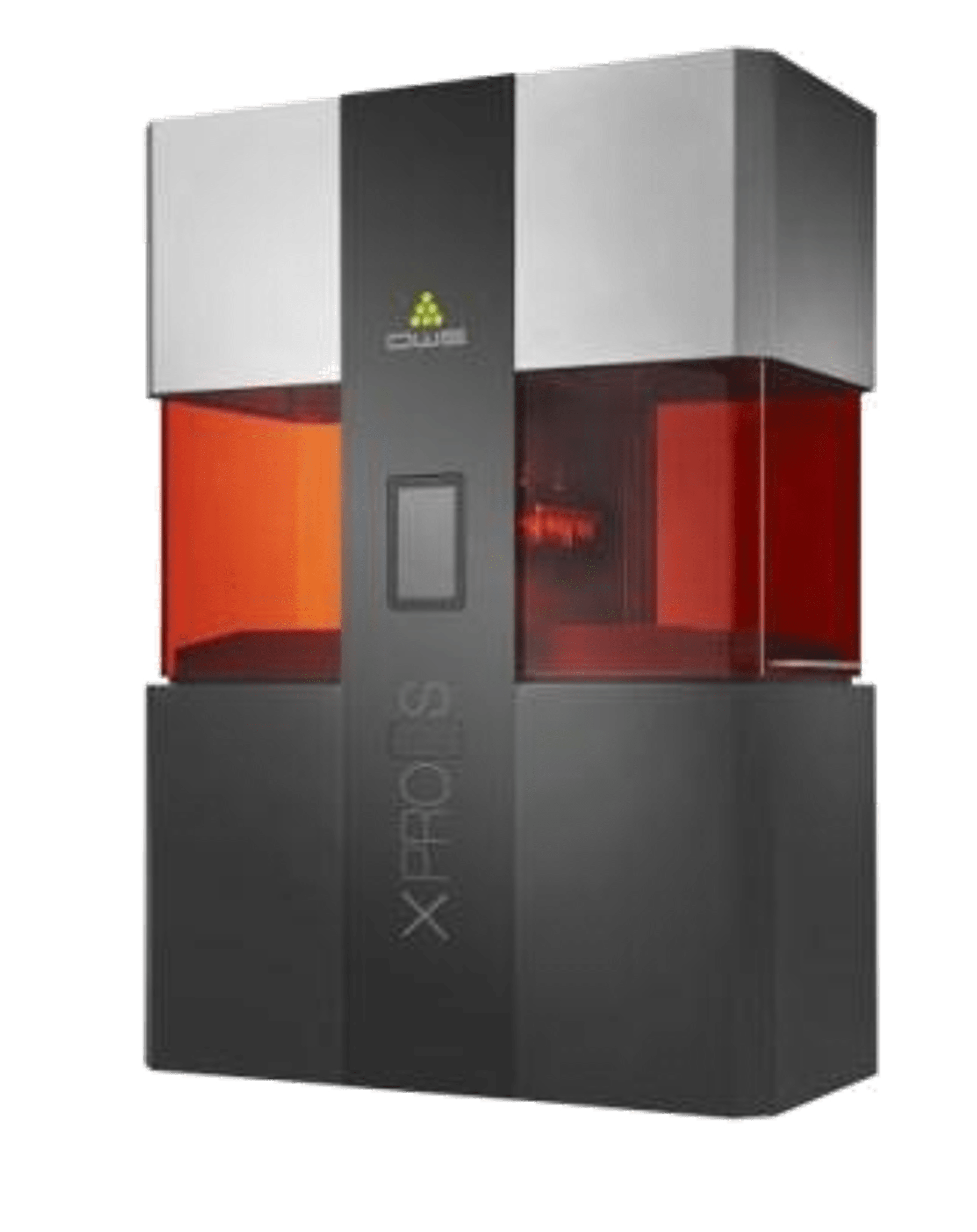 3D DWS Systems XPRO S è una stampante stereolitografica che si serve di una sorgente laser per solidificare una resina liquida fotosensibile, in modo da realizzare modelli tridimensionali in materiale plastico. La macchina utilizza un laser UV di classe 3b, il quale, attraverso un asse mobile e un sistema di specchi oscillanti, permette la realizzazione di modelli tridimensionali.
3D DWS Systems XPRO S è una stampante stereolitografica che si serve di una sorgente laser per solidificare una resina liquida fotosensibile, in modo da realizzare modelli tridimensionali in materiale plastico. La macchina utilizza un laser UV di classe 3b, il quale, attraverso un asse mobile e un sistema di specchi oscillanti, permette la realizzazione di modelli tridimensionali.  La stampante 3D Stratasys J826 è dotata di tecnologia multimateriale ed è in grado di creare oggetti componendo fino a otto materiali dalle differenti proprietà fisiche (opacità e trasparenza) e meccaniche (flessibilità e rigidità). Supporta inoltre più di 500.000 colori, eliminando la necessità di verniciare i modelli. La qualità cromatica della lavorazione è ottimizzata grazie alla convalida Pantone, che rende disponibili i colori del sistema PMS (Pantone Matching System) per la stampa 3D.
La stampante 3D Stratasys J826 è dotata di tecnologia multimateriale ed è in grado di creare oggetti componendo fino a otto materiali dalle differenti proprietà fisiche (opacità e trasparenza) e meccaniche (flessibilità e rigidità). Supporta inoltre più di 500.000 colori, eliminando la necessità di verniciare i modelli. La qualità cromatica della lavorazione è ottimizzata grazie alla convalida Pantone, che rende disponibili i colori del sistema PMS (Pantone Matching System) per la stampa 3D. 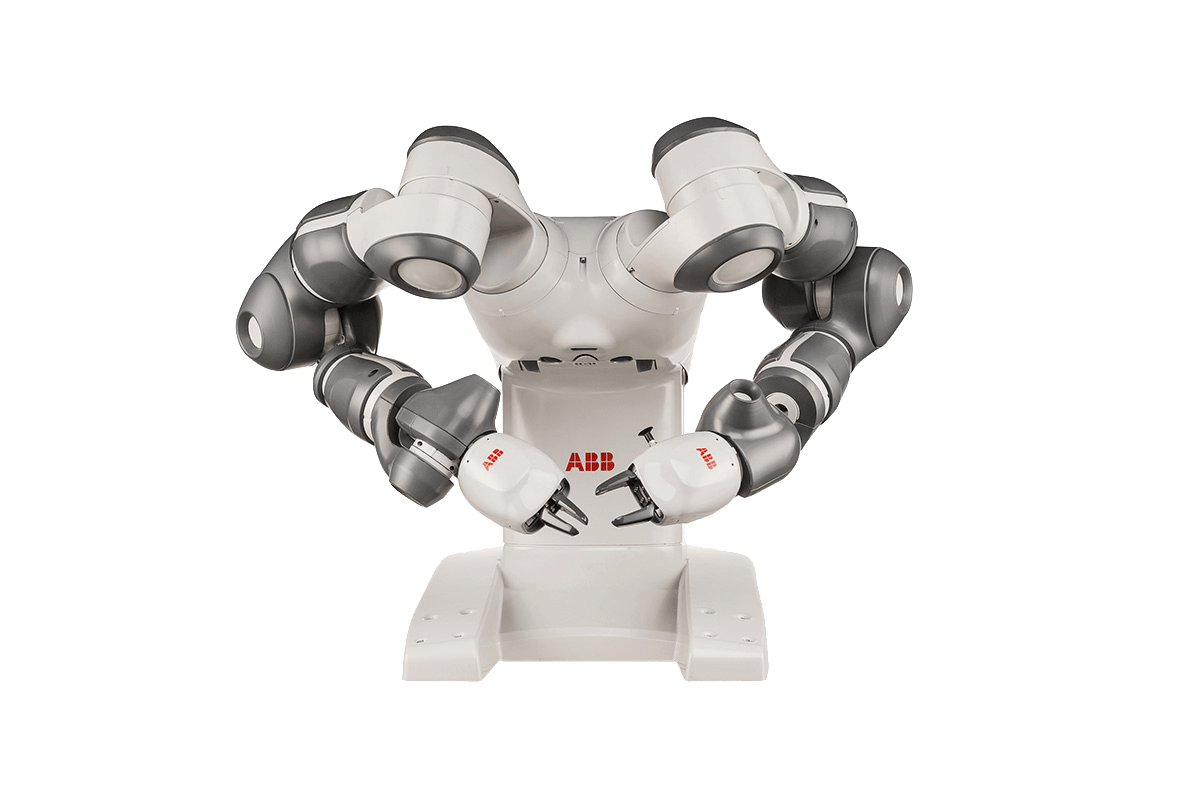 ABB YuMi IRB14000 è un robot collaborativo con due bracci dotati di sette gradi di libertà, per una maggiore flessibilità. Ciascun braccio è equipaggiato di gripper per la raccolta dei piccoli componenti tramite l’ausilio di aria compressa.
ABB YuMi IRB14000 è un robot collaborativo con due bracci dotati di sette gradi di libertà, per una maggiore flessibilità. Ciascun braccio è equipaggiato di gripper per la raccolta dei piccoli componenti tramite l’ausilio di aria compressa.  Kuka LBR iiwa 14 R820 è un robot collaborativo con sette gradi di libertà. Dotato di doppio sensore di coppia su ogni giunto, il robot rileva con accuratezza i contatti ed è in grado di ridurre istantaneamente il livello di forza e velocità esercitate.
Kuka LBR iiwa 14 R820 è un robot collaborativo con sette gradi di libertà. Dotato di doppio sensore di coppia su ogni giunto, il robot rileva con accuratezza i contatti ed è in grado di ridurre istantaneamente il livello di forza e velocità esercitate.  Il PLC di safety Siemens S7-1500 è situato nell’area di assemblaggio e serve a coordinare le attività dei robot, monitorare la sensoristica a supporto e gestire le automazioni introdotte. Questo modello è dotato di funzionalità di safety e gestisce anche il monitoraggio per la sicurezza delle aree. Il PLC supporta il protocollo di comunicazione OPC-UA ed è direttamente integrabile nell’infrastruttura software del laboratorio.
Il PLC di safety Siemens S7-1500 è situato nell’area di assemblaggio e serve a coordinare le attività dei robot, monitorare la sensoristica a supporto e gestire le automazioni introdotte. Questo modello è dotato di funzionalità di safety e gestisce anche il monitoraggio per la sicurezza delle aree. Il PLC supporta il protocollo di comunicazione OPC-UA ed è direttamente integrabile nell’infrastruttura software del laboratorio.  La cella a controllo visuale è costituita dalla telecamera Basler as A1600-60gm e dal laser Gocator 3210A, descritti in seguito. La camera Basler acA1600-60gm GigE è dotata di sensore CMOS e2v EV76C570. Utilizza 60 frame al secondo e una risoluzione di 2 megapixel. È in grado d’interfacciarsi al calcolatore EDGE per effettuare un controllo di qualità del prodotto. Per evitare i disturbi luminosi, la camera viene posta in un’apposita cabina oscurata che si trova in una baia della linea di produzione. Gigabit Ethernet o 'GigE' è l’interfaccia standard per le camere deputate all’image processing in ambito industriale. Qualora un pezzo difettoso fosse rilevato, il sistema riceverebbe una notifica e avvierebbe la procedura di scarto.
La cella a controllo visuale è costituita dalla telecamera Basler as A1600-60gm e dal laser Gocator 3210A, descritti in seguito. La camera Basler acA1600-60gm GigE è dotata di sensore CMOS e2v EV76C570. Utilizza 60 frame al secondo e una risoluzione di 2 megapixel. È in grado d’interfacciarsi al calcolatore EDGE per effettuare un controllo di qualità del prodotto. Per evitare i disturbi luminosi, la camera viene posta in un’apposita cabina oscurata che si trova in una baia della linea di produzione. Gigabit Ethernet o 'GigE' è l’interfaccia standard per le camere deputate all’image processing in ambito industriale. Qualora un pezzo difettoso fosse rilevato, il sistema riceverebbe una notifica e avvierebbe la procedura di scarto.
 Universal Robots UR5e è un robot collaborativo a sei assi posizionato in corrispondenza del sistema a telecamere. Solleva i pezzi durante l’analisi, con lo scopo di esporre tutti i lati alla vista delle telecamere, in modo che l’analisi visuale risulti completa. Il calcolatore EDGE di area ne gestisce la coordinazione.
Universal Robots UR5e è un robot collaborativo a sei assi posizionato in corrispondenza del sistema a telecamere. Solleva i pezzi durante l’analisi, con lo scopo di esporre tutti i lati alla vista delle telecamere, in modo che l’analisi visuale risulti completa. Il calcolatore EDGE di area ne gestisce la coordinazione. VERTIMAG EF è un sistema automatico deputato allo stoccaggio e all’estrazione di materie prime e di prodotti finiti.
VERTIMAG EF è un sistema automatico deputato allo stoccaggio e all’estrazione di materie prime e di prodotti finiti.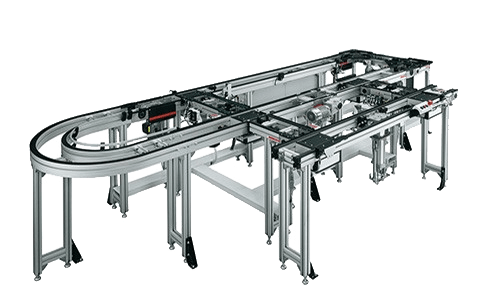 Bosch-Rexroth è la linea che trasporta minipallet, di dimensione 24 x 24 cm e predisposti per ancorare piccoli oggetti, indirizzandoli verso le diverse celle di lavoro. Il software, gestito da un PLC Siemens S7-1200, è programmato per la riconfigurabilità della linea e ha il compito di movimentare e tracciare ogni pallet, senza un percorso predefinito. Per il controllo della linea, è possibile operare da remoto tramite il protocollo OPC-UA oppure in loco tramite il pannello operatore ASEM, completo d’interfaccia grafica interattiva sviluppata con il software di Uniqo HMI.
Bosch-Rexroth è la linea che trasporta minipallet, di dimensione 24 x 24 cm e predisposti per ancorare piccoli oggetti, indirizzandoli verso le diverse celle di lavoro. Il software, gestito da un PLC Siemens S7-1200, è programmato per la riconfigurabilità della linea e ha il compito di movimentare e tracciare ogni pallet, senza un percorso predefinito. Per il controllo della linea, è possibile operare da remoto tramite il protocollo OPC-UA oppure in loco tramite il pannello operatore ASEM, completo d’interfaccia grafica interattiva sviluppata con il software di Uniqo HMI.
 I due robot manipolatori su base mobile Robotnik RB-KAIROS 5 incorporano uno stack software open-source basato su ROS (Robot Operating System). I robot sono composti da una base mobile su ruote (classiche o svedesi) che sostiene un braccio manipolatore UR5.
I due robot manipolatori su base mobile Robotnik RB-KAIROS 5 incorporano uno stack software open-source basato su ROS (Robot Operating System). I robot sono composti da una base mobile su ruote (classiche o svedesi) che sostiene un braccio manipolatore UR5.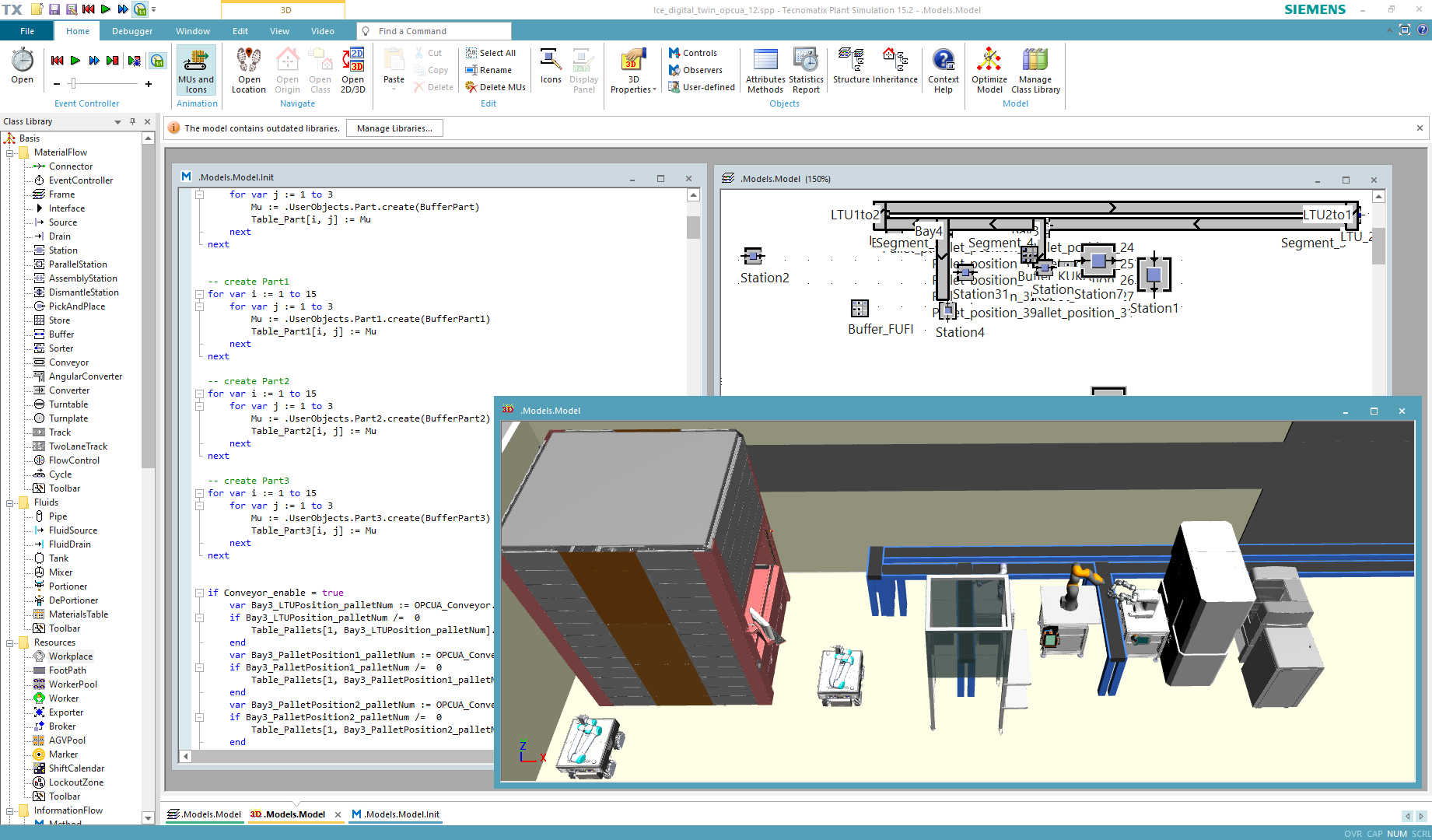 Il Laboratorio ICE ha sviluppato per la propria linea di produzione il Digital Twin, mediante l’utilizzo del software Tecnomatix Plant Simulation di Siemens.
Il Laboratorio ICE ha sviluppato per la propria linea di produzione il Digital Twin, mediante l’utilizzo del software Tecnomatix Plant Simulation di Siemens. Il gateway BOX-IO, prodotto dall’azienda informatica EDALab, è adottato per mettere in comunicazione i sensori IoT con le reti office.
Il gateway BOX-IO, prodotto dall’azienda informatica EDALab, è adottato per mettere in comunicazione i sensori IoT con le reti office.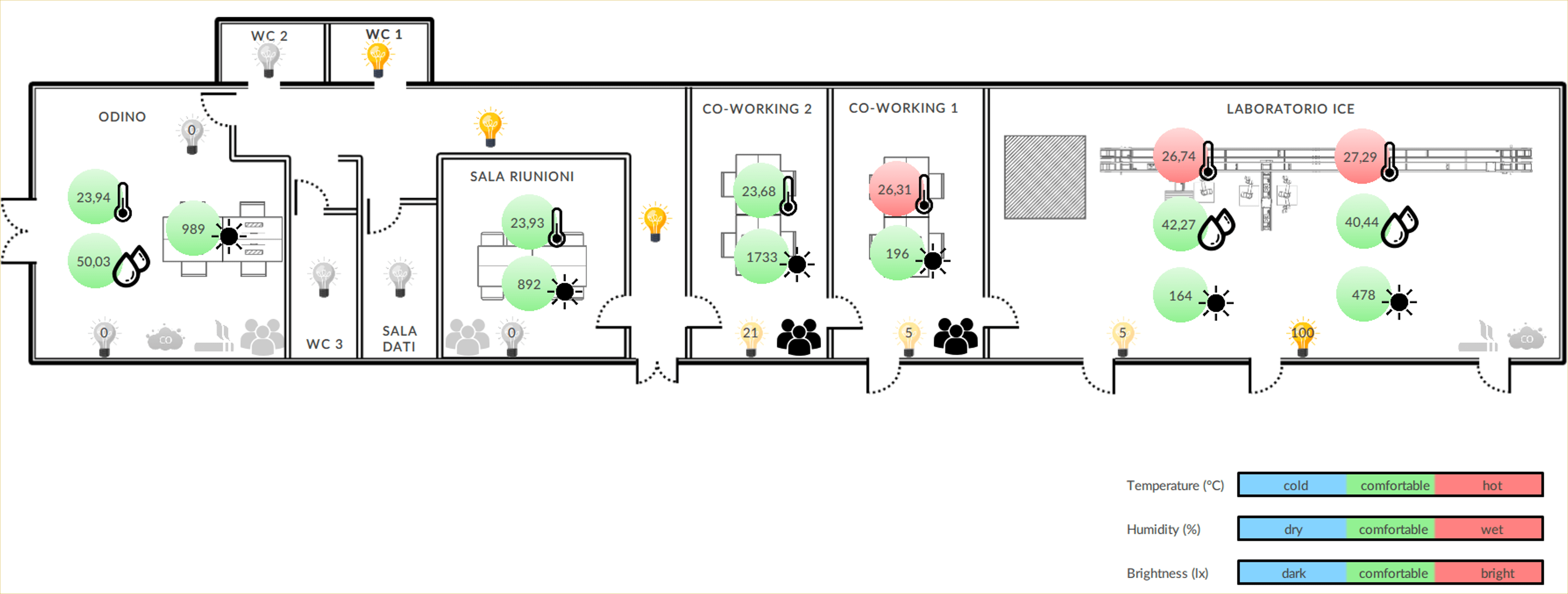 Per il monitoraggio ambientale, è stata creata una dashboard che permette la visualizzazione dei dati raccolti tramite i diversi sensori che sono stati installati nella struttura. Questi trasmettono i dati al gateway intermedio BOXIO che poi trasferisce le informazioni all’architettura di collezione dati.
Per il monitoraggio ambientale, è stata creata una dashboard che permette la visualizzazione dei dati raccolti tramite i diversi sensori che sono stati installati nella struttura. Questi trasmettono i dati al gateway intermedio BOXIO che poi trasferisce le informazioni all’architettura di collezione dati.